简单来说,电机速度PID控制的核心流程是:
这就像开车时的思路:看表速,比对目标速度,适当踩油门或刹车,保持车速稳定。
要实现电机速度PID控制,需要准备以下硬件:
接线图示例:

注意事项: 编码器信号线容易受干扰,一定要使用屏蔽线并做好接地!我曾经因为忽略这一点,导致速度反馈信号异常跳变,系统完全无法稳定工作。从此记住了:"信号线屏蔽"是工控领域的"基本法"!
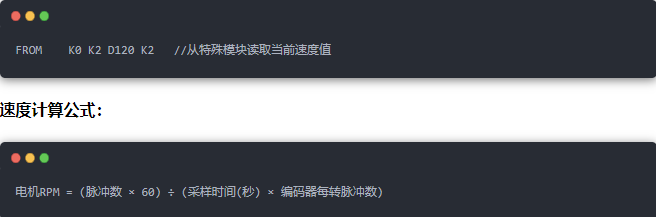
在PID控制之前,首先要解决的是如何准确获取电机的实际转速。三菱PLC提供了两种常用方法:
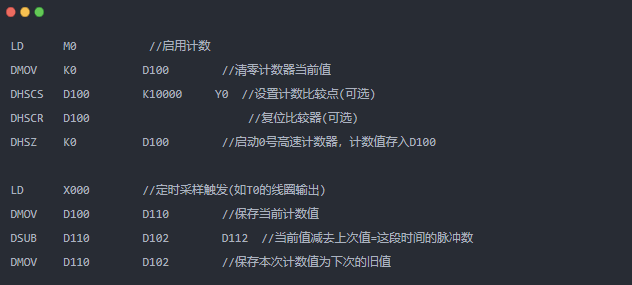
方法2:使用编码器输入特殊模块(FX3U-1PG等)
实战技巧: 实际项目中,我会在程序中增加一个简单的滑动平均滤波,取最近3-5次的速度平均值,有效减少速度波动。

好了,现在我们已经能准确获取速度,下面开始实现PID控制。以FX3U为例:
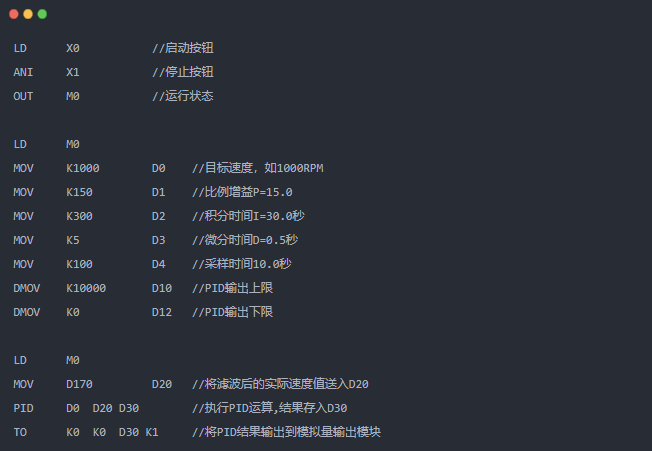
重要提示: 电机速度控制中,D值通常设得比较小,甚至可以设为0。过大的D值会导致速度控制不稳定,电机转速波动。我曾经在一个卷绕机项目中因为D值设置过大,导致电机不断加减速,最终不得不把D值降到最小才解决问题。
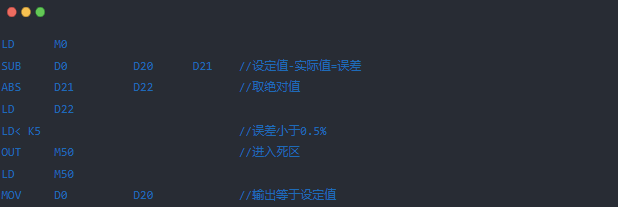
电机速度控制的PID调整与温度控制有所不同,要特别注意:
P值:控制响应速度,但过大会导致超调和震荡
I值:消除稳态误差,使实际速度最终达到设定值
D值:预测系统变化,提前做出调整
电机速度PID调整步骤:
在一个卷绕机项目中,我用三菱FX3U实现了基于速度PID的张力控制。系统需要根据卷径变化自动调整电机速度,保持恒定张力。
遇到的主要问题:
解决方案:
增加软启动功能:通过斜坡函数逐步增加速度设定值

调整PID参数:P值从120降至50,I值从5秒增至15秒
增加前馈控制:根据卷径变化预先计算速度变化量

调整后,系统能平稳启动,卷径变化时速度调整平滑,不良率降低了约70%。
原因: PID控制的积分效应未充分考虑 解决:
原因: P值可能过大或D值设置不当 解决:
原因: I值可能过大或存在机械问题 解决:
对于三菱PLC与三菱变频器系统,可以考虑使用通信方式代替模拟量控制,精度更高且接线简单。
使用RS485通信(如FREQROL 600通信协议):
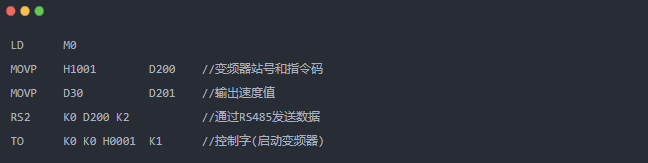
注意事项: 使用通信方式时,务必设置通信超时处理!否则通信中断时变频器可能会保持当前输出状态,造成危险。
电机控制中,安全措施格外重要:
加入速度上下限监控
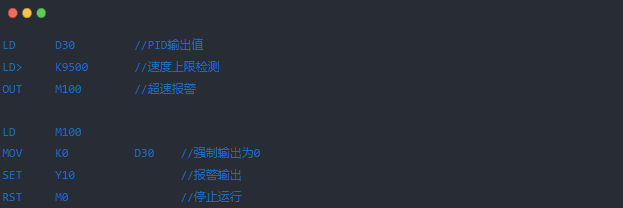
设置加减速时间限制
添加急停功能,在任何异常情况下可立即停机
断电保护:电源恢复后不自动启动
血的教训: 我曾经在一个项目中忽略了这些安全措施,结果在测试时因为程序bug导致电机失控加速,差点损坏设备。从那以后,我对每个控制系统都会先设计安全保护,再实现功能控制。
选择一个简单的12V或24V直流电机,配合编码器和PWM输出(可使用PLC的高速脉冲输出功能),搭建一个简易速度控制系统。先实现开环控制,再加入PID闭环控制,对比两种控制方式的差异。尝试增加负载(如在电机轴上增加重物),观察系统响应变化。通过修改PID参数,体会不同参数对系统性能的影响。
步骤:
关键参数记录表


")

")




