三菱 PLC 定位控制简明指南
1,DRVI(相对定位)
DRVI 速度,脉冲数,脉冲输出,Y方向DRVI K10000 K50000 Y0 Y21,DRVI(相对定位)
DRVI 速度,脉冲数,脉冲输出,Y方向DRVI K10000 K50000 Y0 Y22,DRVA(绝对定位)
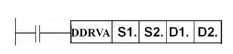
DRVA 速度,目标位置,脉冲输出,Y方向DRVA K10000 K100000 Y0 Y23,PLSY(连续脉冲)
PLSY 频率,脉冲数,脉冲输出PLSY K5000 K0 Y04,ZRN(原点回归)
ZRN 速度,近点狗速度,脉冲输出ZRN K5000 K1000 Y0
二、脉冲 + 方向控制步进电机实现
LD M100→ 定位条件满足
DRVI K8000 → 速度8000HzK30000→ 正转30000脉冲
K0→Y0输出脉冲
Y2→ Y2控制方向3,定位完成处理:
LD M8340→
AND M100
RST M100→
SET M101→
三,M8029 关键注意点
四,GX Works3 核心优势
![]()
五、PLSY 指令最简说明
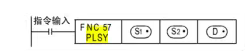
S1中指定频率。允许设定范围:1~32767(Hz)
S2中指定发出的脉冲量,允许设定范围:1~32767(PLS)
32位运算指令DPLSY
输出D中输出[S1· 1、S1]个数频率为[S2 1、S2]的脉冲串。

六、PLSY 指令关键参数与特性
七、当前值寄存器特性
八、指令运行特性
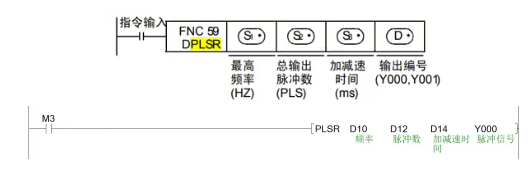
九,PLSV基本参数指令核心要点
十、运行特性
十一、主要缺点
PLSV RAMP输出值,D1,D2
十二、典型应用
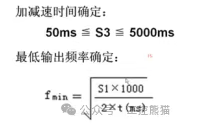
PLSR 指令优化说明
当驱动条件满足时,PLSR 指令从输出端口 D 输出脉冲串,特性如下:
1,参数设置
频率和脉冲数设定
1、 输出频率S1的设定范围是[(FX2N)10~20000HZ] [(FX1S)10~100000HZ],频率设定必须是10的整数倍
2、输出脉冲数的设定范围是:16位运算为110~32767,32位运算为110~2147486947。当设定值不满110时,脉冲不能正常输出
3、 M8029:脉冲发完后,M8029闭合。当M0断开后,M8029自动断开
4、 M8147:Y0输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步
5、 M8148:Y1输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步
6、 M8149:Y2输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步
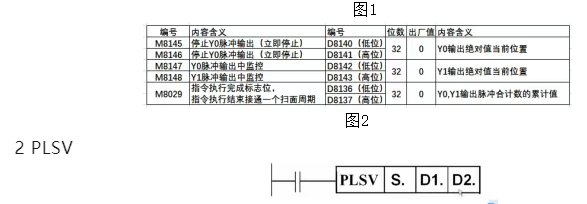
7、 D8140:记录Y0输出的脉冲总数,32位寄存器
8、 D8142:记录Y1输出的脉冲总数,32位寄存器
9、 D8136:记录Y0和Y1输出的脉冲总数,32位寄存器 (针对FX1S)
DRVA
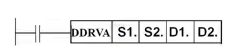
S1 目标的绝对位置脉冲量
S2 输出脉冲频率
D1 输出脉冲端口,仅能Y0或Y1
D2. 指定旋转方向的输出端口,ON:正转,OFF:反转
当驱动条件成立时,输出口D1发出定位脉冲,电机以转速S2转动到位置为绝对位置值S1处。转向由S1与当前位置值比较确定,S1大于当前值时,D2为ON,电机正转;当S1小于当前值时,D2为OFF,电机反转。
与DRVI指令相同
1、指令格式相同
2、特殊软元件相同
3、速度与位置参数相同
4、运行时序相同
5、电机的转向信号都是指令自动完成,与DRVI指令不同,目标位置表示不同
DRVI是用于相对于当前位置的移动量来表示目标位置,而DRVA是用相对于原点的绝对位置值来表示目标位置。
指令中所指定的脉冲数量不同
DRVI指令中所指定的脉冲数量就是PLC输出的数量。而DRVA指令中所指定的数量不是PLC实际发出脉冲的数量。其实际输出脉冲数是与指令驱动前当前值相运算的结果。
暂停再驱动效果不同
DRVI指令暂停后再驱动不能继续原来的运行,而DRVA指令暂停后再驱动可以继续原来的运行。
5 DRVI:
S1 输出脉冲量(位置移动距离)
S2 输出脉冲频率(位置移动速度)
D1 输出脉冲端口,仅能Y0或Y1
D2 指定旋转方向的输出端口(位置移动方向), ON:正转,OFF:反转.
相对定位,相对位移是指移位后位置坐标与当前位置坐标的位移量。
位置控制三要素
1、位置移动方向(电机转动方向)
2、位置移动速度(电机转速)
3、位置移动距离(相对或绝对)
当驱动条件成立时,输出口D1发出定位脉冲,电机以转速S2转动S1个脉冲数。转向由S1的正、负确定。S1为正,D2为ON,电机正转;S1为负,D2为OFF,电机反转。
电机运行时出最高速度,电机实际运行速度必须小于该值,最高速度存于寄存器

")

")




